Abstrak
Berdasarkan mekanisme pencitraan visual manusia, retinal projection display (RPD) secara langsung memproyeksikan gambar ke retina, menghasilkan gambar yang tajam tanpa bergantung pada penyesuaian fokus mata manusia. Akan tetapi, fenomena fisiologis gerakan mata menyulitkan penyelarasan titik konvergensi cahaya gambar dengan pupil manusia, terutama saat pengamat perlu mengenakan kacamata berbingkai yang dikoreksi penglihatan, sehingga menghasilkan gambar yang kabur. Untuk mengakomodasi gerakan mata manusia, di sini, diusulkan sistem RPD berbasis pandu gelombang dengan kotak mata yang diperpanjang dua arah, di mana elemen optik holografik (HOE) dua lapis dirancang sebagai penggabung gambar untuk menghasilkan relief mata yang berbeda di sepanjang sumbu visual mata manusia. Setiap lapisan HOE menghasilkan dua sudut pandang yang tersusun secara horizontal, sehingga mencapai perluasan kotak mata dua arah. Hasil eksperimen menunjukkan bahwa sistem RPD yang diusulkan menyediakan dua set sudut pandang dengan relief mata masing-masing 11 dan 12 mm, dan memperoleh susunan sudut pandang 2 × 2 yang didistribusikan secara horizontal dan aksial. Selain itu, dua set sudut pandang dapat diubah untuk mengakomodasi kebiasaan penggunaan kacamata yang berbeda dari para penonton. Sistem RPD yang diusulkan meningkatkan kemampuan adaptasi perangkat tampilan dekat mata terhadap mata manusia melalui perluasan kotak mata dua arah.
1 Pendahuluan
Teknologi augmented reality (AR) memberikan pengalaman imersif dengan melapiskan gambar virtual pada pemandangan nyata, yang banyak digunakan dalam bidang militer, industri, medis, pendidikan, hiburan, dan bidang lainnya, dan memiliki prospek pengembangan yang signifikan. [ 1 – 4 ] Perangkat AR memerlukan penggabung gambar untuk melapiskan gambar virtual ke pemandangan nyata, dan beberapa penggabung gambar telah diusulkan. [ 5 – 8 ] Di antara ini, elemen optik holografik (HOE) telah muncul sebagai penggabung gambar yang menjanjikan dari sistem tampilan AR karena profilnya yang sangat tipis, selektivitas sudut yang sangat baik, efisiensi difraksi yang tinggi, dan kemampuan untuk mencapai fungsi modulasi optik yang kompleks. [ 9 ] Baru-baru ini, struktur pandu gelombang dengan penggabung gambar telah diadopsi. [ 10 , 11 ] Tampilan AR berbasis pandu gelombang memiliki desain yang tipis dan ringkas, membuatnya lebih cocok untuk perangkat AR bergaya kacamata. [ 12 , 13 ] Di antara berbagai skema tampilan yang mengurangi konflik vergensi-akomodasi, seperti tampilan bidang multifokal, [ 14 , 15 ] tampilan bidang varifokal, [ 16 , 17 ] tampilan pencitraan integral, [ 18 – 20 ] tampilan proyeksi retina (RPD), [ 21 – 24 ] dan tampilan holografik, [ 25 – 27 ] RPD, juga dikenal sebagai tampilan Maxwellian, dapat memberikan gambar yang selalu tajam terlepas dari jarak fokus mata manusia. [ 7 , 28 ] Oleh karena itu, RPD memiliki potensi besar untuk aplikasi.
Namun, kotak mata kecil dan kelegaan mata tetap dari RPD sangat memengaruhi pengalaman visual pengguna. Untuk mendapatkan kotak mata yang besar, para peneliti telah mengusulkan beberapa solusi. Shin-Tson Wu et al. menggunakan deflektor sinar 2D pita lebar yang dirancang sendiri untuk mengurangi kendala kotak mata. Cahaya terpolarisasi linier yang datang dibelokkan dalam arah horizontal dan vertikal secara berurutan untuk menghasilkan susunan sinar 3 × 3, dan kemudian susunan sudut pandang 3 × 3 dibentuk melalui lensa mata; sebagai hasilnya, kotak mata 9 × 9 mm dihasilkan. [ 29 ] Byoungho Lee et al. menyesuaikan HOE menggunakan teknologi pencetakan holografik untuk mendapatkan kotak mata 11 mm dan bidang pandang diagonal (FOV) 50°, dan posisi kotak mata yang diperluas disesuaikan menurut struktur wajah pengguna. [ 30 ] Byoungho Lee et al. juga mengusulkan sistem RPD multiplexing polarisasi dengan sudut pandang yang dapat dialihkan. Dengan menggabungkan kisi terpolarisasi, HOE multipleks, dan lensa okuler yang bergantung pada polarisasi, kelompok sudut pandang ganda dibuat untuk mendukung pergerakan pupil, dan menurut posisi pupil, salah satu kelompok sudut pandang diaktifkan secara selektif untuk mewujudkan kotak mata 16 mm pada arah horizontal. [ 21 ] Selain itu, mereka juga menggunakan beberapa HOE untuk memperbesar kotak mata, yang dapat membentuk sudut pandang berbeda menurut posisi spasial HOE. Sebagian gambar diproyeksikan pada setiap sudut pandang dan gambar lengkap dengan FOV lebar dan kotak mata besar diperoleh dari beberapa sudut pandang. [ 31 ] Juan Liu dkk. mengusulkan metode kotak mata yang diperluas dengan jarak sudut pandang yang dapat disesuaikan dengan menggerakkan jarak antara kisi polarisasi secara mekanis dan mencapai kotak mata 12 mm pada arah horizontal dan FOV diagonal 32,7°, yang cocok untuk pengguna dengan ukuran pupil berbeda. [ 23 ] Jae-Hyeung Park dkk. memanfaatkan susunan HOE lubang jarum untuk mencapai perluasan kotak mata sebesar 4,5 kali horizontal dan 2 kali vertikal, serta FOV 9,29°. [ 22 ]
Skema yang disebutkan di atas secara efektif memperluas kotak mata dalam arah horizontal dan vertikal. Namun, perluasan aksial kotak mata juga diperlukan. Di satu sisi, fitur wajah pengguna sangat bervariasi; di sisi lain, pengguna yang mengenakan kacamata dengan koreksi penglihatan terkadang mengenakan kacamata bingkai dan terkadang mengenakan lensa kontak; dengan demikian, kelegaan mata harus diubah sesuai dengan itu. Saat ini, prevalensi miopia global melebihi 28,3% dan diproyeksikan mencapai 49,8% pada tahun 2050. [ 32 – 34 ] Saat ini, kacamata AR, seperti Rayneo Air2 [ 35 ] dan Rokid Max, [ 36 ] sekarang dilengkapi dengan lensa korektif untuk pengguna miopia. Namun, setiap pengguna memiliki derajat miopia dan astigmatisme yang berbeda, sehingga sulit untuk beradaptasi dengan orang yang berbeda. Oleh karena itu, perangkat AR memerlukan kelegaan mata yang dapat disesuaikan untuk memenuhi beragam kebutuhan pengguna.
Dalam artikel ini, diusulkan sistem RPD berbasis pandu gelombang dengan perluasan kotak mata dua arah. Dalam sistem yang diusulkan, penggabung gambar yang terdiri dari dua lapisan HOE dibuat menggunakan multiplexing sudut untuk memperoleh dua kelegaan mata di sepanjang arah aksial, dan setiap lapisan HOE dirancang untuk menghasilkan dua sudut pandang horizontal. Jadi, susunan sudut pandang 2 × 2 dibentuk untuk mencapai perluasan kotak mata dalam dimensi horizontal dan aksial. Berdasarkan selektivitas sudut HOE, peralihan antara dua kelegaan mata dapat dicapai, sehingga dapat beradaptasi dengan fitur wajah yang berbeda dan memenuhi kebiasaan orang yang berbeda dalam mengenakan kacamata.
2 Struktur dan Prinsip Sistem RPD Eyebox Extended Dua Arah yang Diusulkan
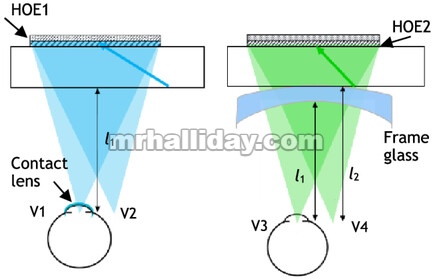
Gambar 1 menunjukkan diagram skematik dari sistem RPD berbasis pandu gelombang yang kami usulkan dengan eyebox yang diperluas dua arah. Sistem yang diusulkan terdiri dari modul masukan gambar, pandu gelombang, dan kopler keluaran, seperti yang ditunjukkan pada Gambar 1a . Modul masukan gambar tersusun atas proyektor laser, lensa kolimasi, prisma sudut siku-siku, dan rangka penyesuaian. Berkas pencitraan yang diproyeksikan dari proyektor laser dikolimasi oleh lensa kolimasi lalu dikoplerkan ke dalam pandu gelombang oleh prisma sudut siku-siku. Proyektor laser dan lensa kolimasi dipasang pada rangka penyesuaian untuk mengendalikan sudut datang berkas kolimasi, sehingga berkas kolimasi datang ke dalam pandu gelombang pada sudut θ 1 atau θ 2 lalu menjalar di dalam pandu gelombang melalui refleksi total. Kopler keluaran adalah HOE dua lapis yang memuat HOE1 dan HOE2. Sinar pencitraan yang merambat dengan sudut refleksi total θ 1 memenuhi kondisi pencocokan Bragg dari HOE1 dan dibelokkan oleh HOE1 untuk membentuk lapisan pertama sudut pandang (V1 dan V2). Demikian pula, sinar yang merambat dengan sudut refleksi total θ 2 memenuhi kondisi pencocokan Bragg dari HOE2, dan sinar difraksi dari HOE2 membentuk lapisan kedua sudut pandang (V3 dan V4). Oleh karena itu, sistem yang diusulkan menghasilkan susunan sudut pandang 2 × 2 yang disusun secara horizontal dan aksial.
Gambar 1
a) Diagram skema sistem yang diusulkan, b) pembentukan sudut pandang V1 dan V2 pada lapisan pertama, dan c) pembentukan sudut pandang V3 dan V4 pada lapisan kedua.
Ketika pengguna tidak mengenakan kacamata dengan koreksi penglihatan atau mengenakan lensa kontak, bingkai penyesuaian terletak pada posisi 1, dan pada saat ini, HOE1 bekerja dan membelokkan berkas pencitraan. Seperti yang ditunjukkan pada Gambar 1b , berkas pencitraan dibelokkan dari HOE1 dan bertemu pada jarak l 1 dari permukaan belakang pemandu gelombang untuk membentuk sudut pandang V1 dan V2. Ketika pengguna mengenakan kacamata bingkai, bingkai penyesuaian terletak pada posisi 2, dan HOE2 bekerja. Seperti yang ditunjukkan pada Gambar 1c , berkas pencitraan yang dibelokkan dari HOE2 selanjutnya dibiaskan oleh kacamata bingkai, membentuk sudut pandang V3 dan V4 pada jarak l 2 dari permukaan belakang pemandu gelombang. Selama aplikasi praktis, dua lapisan sudut pandang dapat diaktifkan secara selektif dengan mengendalikan bingkai penyesuaian, yang sangat meningkatkan kemampuan beradaptasi sistem RPD terhadap mata manusia.
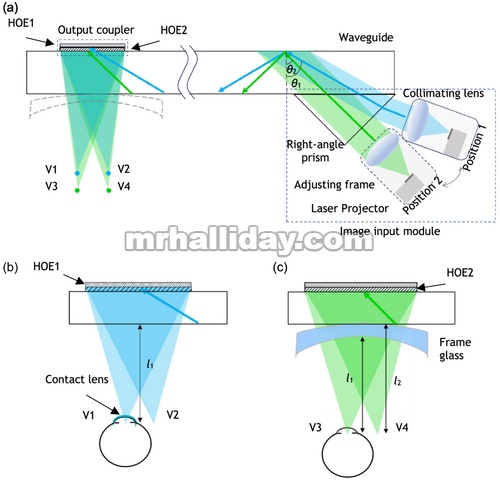
Untuk sudut pandang V1 dan V2, kelegaan mata l 1 ditentukan secara unik oleh HOE1. Namun, untuk sudut pandang V3 dan V4, kelegaan mata l 2 terkait dengan HOE2 dan kaca yang dikenakan oleh pengamat. Seperti yang ditunjukkan pada Gambar 2 , garis putus-putus mewakili berkas difraksi yang dibentuk oleh HOE2, dan garis padat mewakili berkas yang selanjutnya dibiaskan oleh kaca, di mana kaca dianggap sebagai lensa tipis. Oleh karena itu, jarak D antara titik konvergensi berkas HOE2 dan permukaan belakang pandu gelombang harus memenuhi
di mana f ′ adalah panjang fokus kaca bingkai, l 2 adalah jarak antara bidang sudut pandang pada lapisan kedua dan permukaan belakang pemandu gelombang, dan Δ l adalah ketebalan tengah kaca bingkai.
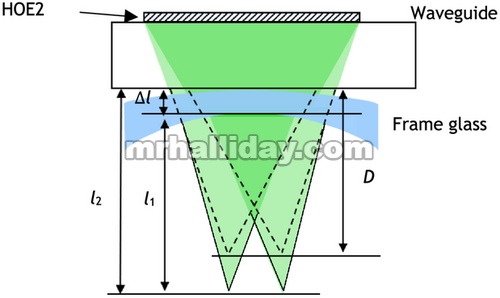
Pada permukaan coupler input, lebar berkas harus dibatasi secara ketat. Seperti yang ditunjukkan pada Gambar 3a , ketika lebar berkas datang terlalu besar, sebagian berkas setelah refleksi total pertama (ditunjukkan dengan kotak putus-putus) akan langsung masuk ke udara melalui prisma, yang menyebabkan hilangnya informasi gambar. Untuk memastikan bahwa gambar virtual dapat ditampilkan sepenuhnya, lebar berkas input dibatasi sebagai berikut
di mana d adalah ketebalan pandu gelombang dan θ w adalah sudut refleksi total berkas di pandu gelombang. Seperti yang ditunjukkan pada Gambar 3b , ketika lebar berkas datang mencapai nilai maksimum, berkas pencitraan dapat dipantulkan sepenuhnya dan menampilkan gambar dengan FOV maksimum.
Gambar 3
a) Ketika lebar sinar datang melampaui batas dan b) ketika lebar sinar datang mencapai nilai maksimum yang diizinkan.
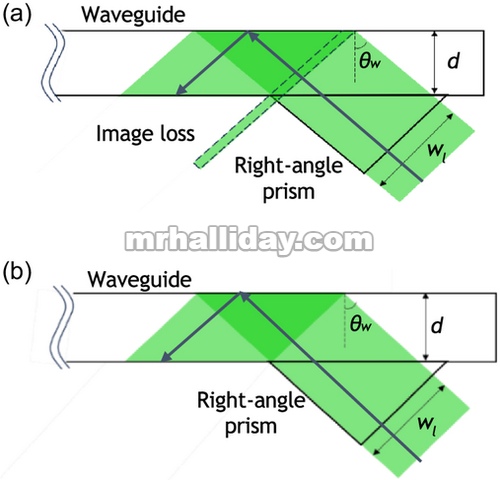
Ketidakselarasan lebar efektif dan posisi HOE keluaran dengan sinar datang akan menyebabkan duplikasi, pemotongan, dan pembalikan gambar, seperti yang ditunjukkan pada Gambar 4. Ketika lebar efektif HOE keluaran, w HOE , lebih besar daripada lebar sinar datang, w l ′, seperti yang ditunjukkan pada Gambar 4a, bagian dari sinar datang, ditunjukkan oleh panah putus-putus, akan dimodulasi dua kali oleh HOE keluaran, yang menyebabkan duplikasi gambar. Ketika w HOE lebih kecil daripada w l ′, seperti yang ditunjukkan pada Gambar 4b , bagian kiri sinar datang, ditunjukkan oleh panah putus-putus, tidak dapat mencapai HOE keluaran, yang mengakibatkan pemotongan gambar. Ketika HOE keluaran tidak selaras dengan sinar datang, seperti yang ditunjukkan pada Gambar 4c , bagian kanan sinar, ditunjukkan oleh panah putus-putus, akan mencapai sisi kiri HOE keluaran setelah dua kali refleksi total; dengan demikian, bagian kanan gambar dibalik ke sisi kiri. Oleh karena itu, untuk mengamati gambar yang benar dan lengkap, w HOE dan w l ′ harus memenuhi persamaan berikut
di mana w l ′ adalah lebar sinar paralel masukan yang datang pada permukaan pandu gelombang.
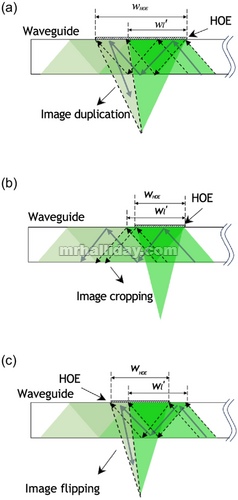
Gambar 4
Ketidakselarasan lebar dan posisi HOE keluaran dengan sinar datang. a) w HOE lebih besar dari w l ′, b) w HOE lebih kecil dari w l ′, dan c) ketidaksesuaian posisi antara HOE keluaran dan sinar datang.
Seperti yang ditunjukkan pada Gambar 5 , FOV sistem dapat dinyatakan sebagai
di mana h merupakan jarak antara HOE dan sudut pandang, yang merupakan jumlah ketebalan pandu gelombang dan kelegaan mata HOE, dan g merupakan jarak lateral antara sudut pandang yang berdekatan.
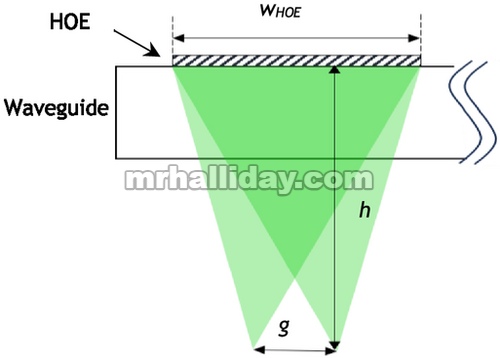
Gambar 5
Diagram skema perhitungan FOV.
3 Bagian Percobaan dan Hasil
Gambar 6 menunjukkan proses perekaman HOE dua lapis. Dalam percobaan, bahan perekaman holografik adalah fotopolimer Bayfol HX200, dan sumber laser perekaman adalah laser hijau dengan panjang gelombang 532 nm. Dalam lintasan optik perekaman HOE1, seperti yang ditunjukkan oleh panah kuning pada Gambar 6 , berkas referensi 1 dipantulkan oleh M1 ke prisma siku-siku 45° dan mengenai fotopolimer pada sudut sumbu 60°. Dalam lintasan optik perekaman HOE2, seperti yang ditunjukkan oleh panah biru pada Gambar 6 , berkas referensi 2 dipantulkan oleh M2 ke prisma dan mengenai fotopolimer pada sudut sumbu 45°. Berkas sinyal terdiri dari dua gelombang sferis yang konvergen (SB1 dan SB2), yang dihasilkan melalui lensa perekaman. Untuk kasus di mana kaca bingkai tidak digunakan, HOE1 dengan eye relief 12 mm dibuat. Untuk kasus penggunaan kaca bingkai miopia 800° dengan panjang fokus -125 mm dan ketebalan tengah 1,1 mm, dibuat HOE2 dengan jarak pandang 11 mm. Baik HOE1 maupun HOE2 masing-masing membentuk dua sudut pandang, dan jarak lateral antara kedua sudut pandang tersebut adalah 5 mm.
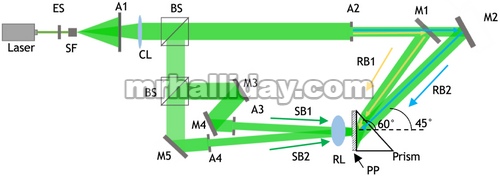
Gambar 6
Diagram skematis proses perekaman untuk HOE dua lapis. ES, rana elektronik; A1, A2, A3, A4, bukaan; SF, filter spasial; CL, lensa kolimasi; BS, pemisah berkas; M1, M2, M3, M4, M5, cermin; SB1, berkas sinyal 1; SB1, berkas sinyal 2; RL, lensa perekaman; PP, fotopolimer; RB1, berkas referensi 1; dan RB2, berkas referensi 2.
Prototipe sistem RPD kotak mata dwiarah yang diusulkan dibangun, seperti yang ditunjukkan pada Gambar 7 , dan parameter terperinci ditunjukkan pada Tabel 1. Proyektor pemindaian laser (LSP) dengan piksel 1280 × 720 digunakan sebagai sumber gambar. LSP dan lensa kolimasi dipasang pada bingkai penyesuaian untuk mengubah sudut datang sinar proyeksi. Ketebalan pemandu gelombang adalah 4 mm. Cairan pencocokan indeks bias Cargille digunakan untuk mengisi celah udara antara prisma siku-siku dan pemandu gelombang. Kamera telepon pintar f/2 menangkap gambar yang ditampilkan, bukan mata manusia.
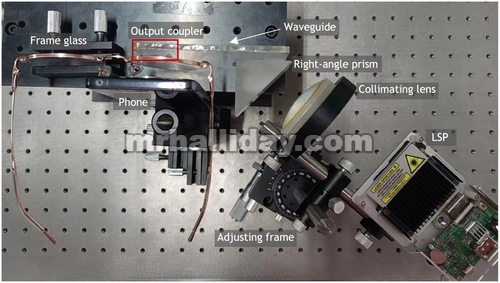
Gambar 7
Prototipe optik sistem RPD kotak mata dua arah yang diperluas.
Tabel 1. Spesifikasi prototipe eksperimental.
| Komponen | Spesifikasi | Nilai-nilai |
|---|---|---|
| Balok referensi | Sudut datang balok referensi 1 | 60° |
| Sudut datang balok referensi 2 | 45° | |
| Laser solid-state hijau | Panjang gelombang λ | 532nm |
| Bahan fotopolimer | Jenis bahan | Bayfol HX200 |
| Ketebalan | 16 mikron | |
| CANGKIR 1 | Pereda mata l 1 | 12mm |
| CANGKIR 2 | Pereda mata D | 11 mm |
| Proyektor | Model | HD301A1-H2 |
| Resolusi | Ukuran 1280 × 720 | |
| Pemandu gelombang | Ketebalan | 4 juta |
| Bingkai kaca | Panjang fokus | -125 mm |
| Ketebalan tengah | 1,1 mm |
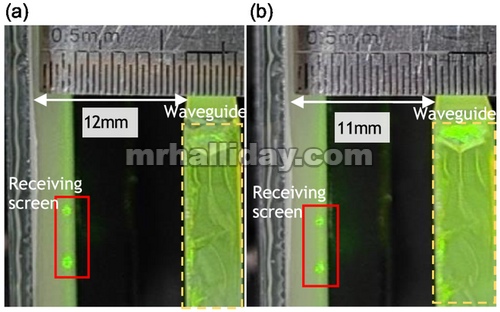
Pembentukan sudut pandang diukur melalui layar penerima. Gambar 8a,b menunjukkan dua lapisan sudut pandang yang diterima oleh layar penerima. Sudut pandang lapisan pertama (V1 dan V2) diterima pada jarak pandang 12 mm. Kami mengubah dan memutar rangka penyesuaian untuk menyelaraskan sudut datang berkas dengan kondisi pencocokan Bragg HOE2, dan sudut pandang lapisan kedua (V3 dan V4) diterima pada jarak pandang 11 mm. Jarak antara sudut pandang yang berdekatan adalah 5 mm. Jarak pandang yang diukur dan jaraknya konsisten dengan desain teoritis.
Gambar 8
Pengukuran jarak pandang mata pada a) sudut pandang lapisan pertama dan b) sudut pandang lapisan kedua.
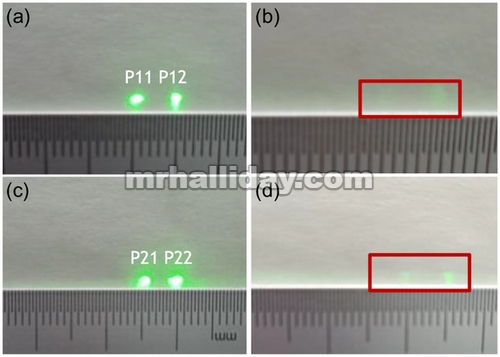
Gambar 9 menunjukkan distribusi berkas difraksi yang dihasilkan oleh HOE1 dan HOE2 dalam kasus sudut Bragg yang cocok dan sudut Bragg yang tidak cocok, masing-masing. Seperti yang ditunjukkan pada Gambar 9a,c , ketika berkas referensi datang pada HOE1 dan HOE2 pada sudut 45° dan 60°, masing-masing, keempat berkas konvergen yang didifraksi oleh HOE1 dan HOE2 difokuskan dengan baik pada empat titik (P11, P12, P21, dan P22) pada layar penerima dengan ruang 5 mm. Efisiensi difraksi terukur dari P11, P12, P21, dan P22 adalah 32,06, 49,45, 40,57, dan 34,22%, memberikan total 81,51 dan 74,79% untuk HOE1 dan HOE2, masing-masing. Gambar 9b, d menunjukkan crosstalk yang tidak diinginkan ketika sudut datang adalah 60° untuk HOE1 dan 45° untuk HOE2, yang menyimpang sebesar 15° dari sudut Bragg yang sesuai. Efisiensi difraksi crosstalk yang diukur adalah 5,45 dan 9,12% untuk HOE1 dan HOE2, yang hampir tidak terlihat oleh mata manusia. Crosstalk yang tidak diinginkan untuk HOE1 dan HOE2 disebabkan oleh hamburan yang disebabkan oleh partikel, ketika berkas mengalami beberapa refleksi dalam pandu gelombang dan difraksi nonideal dari HOE. Crosstalk dapat diminimalkan lebih lanjut dengan mengurangi jumlah refleksi atau meningkatkan pemisahan sudut datang dari dua berkas referensi.
Gambar 9
Sinar difraksi yang diamati dari HOE1 dan HOE2 pada bidang pupil mata. a) Titik pandang (P11 dan P12) dibelokkan oleh HOE1 dengan sudut datang 45°, b) gangguan tak terduga yang dibelokkan oleh HOE1 dengan sudut datang 60°, c) titik pandang (P21 dan P22) dibelokkan oleh HOE2 dengan sudut datang 60°, dan d) gangguan tak terduga yang dibelokkan oleh HOE2 dengan sudut datang 45°.
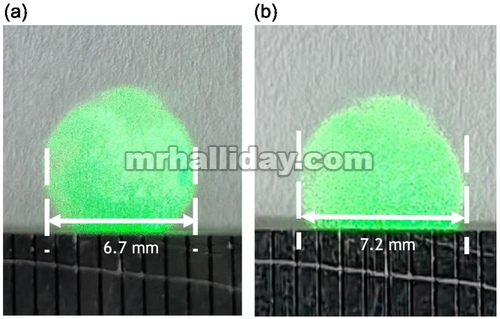
Untuk mengukur FOV sistem, layar penerima ditempatkan 15 mm dari bidang pupil keluar untuk menerima titik cahaya yang menyebar, dan FOV sistem dihitung dengan mengukur diameter titik. Seperti yang ditunjukkan pada Gambar 10a , diameter titik di V1 adalah 6,7 mm dan FOV horizontal adalah 24,55°. Seperti yang ditunjukkan pada Gambar 10b , diameter titik di V3 adalah 7,2 mm, dan FOV horizontal adalah 26,32°. Menurut Persamaan ( 4 ), FOV teoritis dari sudut pandang lapisan pertama dan lapisan kedua harus masing-masing adalah 27,47° dan 29,13°. FOV yang diukur sedikit lebih kecil dari nilai teoritis, mungkin karena dua faktor. Di satu sisi, dua berkas sinyal tidak tumpang tindih sepenuhnya selama proses perekaman, membuat lebar efektif HOE kurang dari 8 mm, yang mengakibatkan pengurangan FOV. Di sisi lain, selama proses rekonstruksi, sinar datang memiliki tingkat konvergensi tertentu, dan lebar sinar yang ditransmisikan ke HOE kurang dari 8 mm, yang membuat titik difraksi lebih kecil.
Gambar 10
Pengukuran FOV a) V1 dan b) V3.
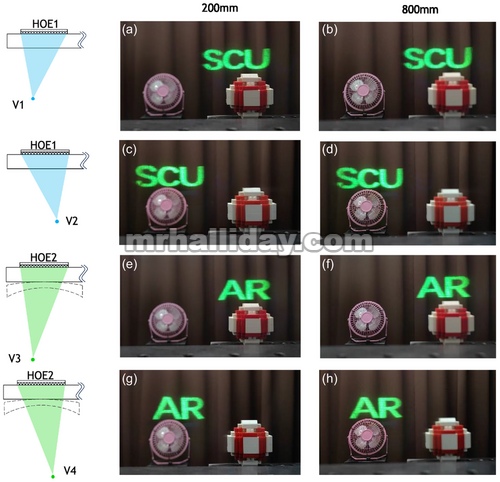
Dalam percobaan tampilan optik, dua objek nyata “blok” dan “kipas”, sebagai objek referensi, ditempatkan pada jarak 200 dan 800 mm dari sistem, masing-masing. Gambar 11 menunjukkan gambar yang ditangkap oleh kamera pada setiap sudut pandang saat kamera difokuskan pada 200 dan 800 mm, masing-masing. Pada sudut pandang, V1 dan V2, saat kamera difokuskan pada 200 mm, seperti yang ditunjukkan pada Gambar 11a,c , gambar virtual “SCU” ditampilkan dengan jelas, sementara objek nyata “blok” dalam pemandangan nyata jelas dan “kipas” kabur. Saat difokuskan pada 800 mm, seperti yang ditunjukkan pada Gambar 11b,d , gambar virtual “SCU” masih ditampilkan dengan jelas, sementara “blok” dalam pemandangan nyata kabur dan “kipas” jelas. Kaca bingkai miopia 800° digunakan saat memotret pada sudut pandang, V3 dan V4. Ketika kamera difokuskan pada 200 mm, seperti yang ditunjukkan pada Gambar 11e,g , gambar virtual “AR” jelas, sedangkan objek nyata “blok” jelas dan “kipas” kabur. Ketika kamera difokuskan pada 800 mm, seperti yang ditunjukkan pada Gambar 11f,h , gambar virtual “AR” masih ditampilkan dengan jelas, sedangkan “blok” dalam pemandangan nyata kabur dan “kipas” jelas. Hasilnya menunjukkan bahwa gambar virtual dapat diamati dengan jelas pada sudut pandang V1, V2, V3, dan V4 terlepas dari di mana kamera difokuskan. Perlu dicatat bahwa sedikit perbedaan dalam kecerahan gambar virtual “SCU” pada sudut pandang V1 dan V2 disebabkan oleh kesalahan pengukuran dan gangguan udara selama proses fabrikasi, yang memerlukan penerapan pengaturan perekaman yang lebih canggih untuk perbaikan. Terbukti bahwa sistem yang diusulkan dapat mewujudkan perluasan kotak mata dua arah, dan setiap lapisan sudut pandang memiliki karakteristik RPD untuk beradaptasi dengan kebiasaan pemakaian kacamata yang berbeda.
Gambar 11
Gambar “SCU” yang diambil di V1 saat kamera difokuskan pada a) 200 mm dan b) 800 mm, gambar “SCU” yang diambil di V2 saat kamera difokuskan pada c) 200 mm dan d) 800 mm, gambar “AR” yang diambil di V3 saat kamera difokuskan pada e) 200 mm dan f) 800 mm, dan gambar “AR” yang diambil di V4 saat kamera difokuskan pada g) 200 mm dan h) 800 mm.
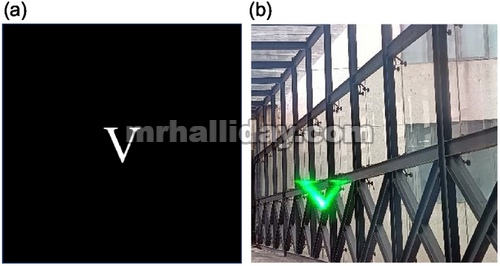
Gambar 12a,b menunjukkan gambar yang ditampilkan “V” dan gambar virtual yang ditangkap pada titik pandang V1, masing-masing. Hasilnya menunjukkan bahwa bahkan di bawah cahaya sekitar yang kuat, gambar virtual “V” dengan kecerahan tinggi masih dapat diamati dengan jelas, yang menunjukkan bahwa sistem pandu gelombang yang diusulkan memiliki rasio kontras sekitar yang tinggi dan memastikan penggunaan sehari-hari di lingkungan luar ruangan.
Gambar 12
a) Menampilkan gambar “V” dan b) menangkap gambar sudut pandang V1 di bawah cahaya sekitar yang kuat.
Objek nyata “topeng” berfungsi sebagai objek referensi latar belakang dan gambar “papan catur” diproyeksikan ke HOE1 dan HOE2, masing-masing, untuk memvalidasi perluasan kotak mata aksial dari sistem yang diusulkan, seperti yang ditunjukkan pada Gambar 13. Gambar 13a,b menunjukkan gambar difraksi yang ditangkap dari sudut pandang V1 dari HOE1 tanpa dan dengan kaca bingkai, masing-masing. Ketika kaca bingkai tidak digunakan untuk HOE1, gambar virtual “papan catur” ditampilkan dengan jelas dan lengkap. Ketika menggunakan kaca bingkai untuk HOE1, sudut pandang V1 tidak sejajar dengan pupil mata karena refraksi oleh kaca bingkai, yang menyebabkan sebagian hilang di sudut kiri atas gambar virtual “papan catur”. Seperti yang ditunjukkan pada Gambar 13c , ketika menggunakan kaca bingkai untuk HOE2, gambar virtual “papan catur” dari sudut pandang V3 dapat diamati sepenuhnya lagi melalui kompensasi panjang fokus kaca bingkai oleh HOE2. Hasilnya menunjukkan bahwa sistem yang diusulkan dapat mencapai perluasan kotak mata aksial untuk mengatasi masalah ketidakselarasan antara kelengkungan mata dan pupil mata.

Gambar 13
Gambar yang ditangkap dari a) sudut pandang V1 dari HOE1 tanpa bingkai kaca, b) sudut pandang V1 dari HOE1 dengan bingkai kaca, dan c) sudut pandang V3 dari HOE2 dengan bingkai kaca.
Perlu dibahas bagaimana merancang interval sudut pandang menurut karakteristik visual manusia untuk pengalaman visual yang lebih baik. Seperti yang ditinjau Lin et al., [ 37 ] tiga kelompok HOE sebagai kopler keluaran pandu gelombang disusun pada interval tertentu di permukaan depan dan belakang pandu gelombang, dan setiap kelompok HOE berisi dua lapisan HOE. Lapisan pertama berfungsi untuk berkas referensi dengan sudut datang 45° dan lapisan kedua berfungsi untuk berkas referensi dengan sudut datang 60°. Kedua lapisan membentuk sudut pandang dengan relief mata yang berbeda untuk beradaptasi dengan kebiasaan penggunaan mata yang berbeda. Tiga kelompok HOE harus dirancang khusus sehingga sinar utama dari berkas yang dibelokkan sesuai dengan arah pandangan mata. [ 38 ] Menurut diameter dan sudut rotasi pupil, interval sudut pandang yang lebih tepat dapat ditentukan untuk mengakomodasi perubahan ukuran pupil di lingkungan yang terang dan mengatasi masalah pandangan mata.
Untuk realisasi sistem penuh warna, HOE yang digunakan dalam sistem yang diusulkan adalah Bayfol HX200, yang dapat direkam dengan laser yang sesuai dalam kisaran 440–680 nm, sehingga HOE penuh warna dapat dibuat menggunakan laser RGB secara bersamaan sebagai sumber cahaya perekaman. [ 39 ] HOE penuh warna direkam dengan berkas referensi dengan sudut datang yang berbeda dan ditumpuk sebagai coupler keluaran untuk mencapai eyebox yang diperluas dua arah. Namun, pembuatan HOE penuh warna dengan efisiensi difraksi yang tinggi merupakan suatu tantangan. Metode paparan iteratif terjadwal waktu, [ 40 ] dengan mengendalikan rasio waktu paparan dari tiga panjang gelombang, dapat digunakan untuk merekam HOE penuh warna dengan efisiensi difraksi yang tinggi.
Dua lapisan HOE digunakan sebagai coupler output untuk menghasilkan array sudut pandang 2 × 2 dalam arah horizontal dan aksial, tetapi masih ada ruang yang signifikan untuk peningkatan. Metode paparan time-multiplexing dapat digunakan untuk merekam berbagai area HOE secara berurutan untuk menghasilkan beberapa sudut pandang dalam arah horizontal dan vertikal. [ 41 ] Selain itu, beberapa HOE dengan relief mata yang berbeda direkam oleh sinar referensi dengan sudut datang yang berbeda dan beberapa sudut pandang aksial dapat diperoleh. Karena HOE mempertahankan efisiensi difraksi tertentu dalam rentang deviasi yang ditentukan untuk sudut datang sinar referensi, pemisahan sudut datang harus lebih besar daripada lebar pita sudut HOE untuk menghindari crosstalk.
4 Kesimpulan
Dalam artikel ini, untuk mengatasi masalah ketidaksejajaran antara kelegaan mata dan pupil manusia yang disebabkan oleh perbedaan fitur wajah dan kebiasaan mengenakan kacamata yang dikoreksi penglihatan, sistem RPD tipe pandu gelombang dengan kotak mata yang diperpanjang dua arah diusulkan. HOE dua lapis melakukan fungsi optik dari penggabung gambar dengan dua kelegaan mata masing-masing 11 dan 12 mm pada arah aksial. Setiap lapisan HOE menghasilkan dua sudut pandang dengan jarak horizontal 5 mm, yang akhirnya membentuk susunan sudut pandang 2 × 2 di kedua arah. Melalui rotasi dan translasi bingkai penyesuaian, sudut pandang kelegaan mata yang berbeda dapat dialihkan secara opsional dan gambar virtual pada dua set sudut pandang dapat selalu difokuskan dan jelas, yang menyajikan sifat-sifat RPD. Sistem yang diusulkan dapat mengakomodasi pengguna dengan berbagai fitur wajah dan kebiasaan mengenakan, memperluas penerapan perangkat RPD.